
| 品牌 : | 经锐/APEX |
注塑机械手的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。操作者通过人机界面进行操作,在机械手收到注塑机给出的可执行信号时,机械手切断注塑机的可关模信号,保证机械手取物的可靠性,在完成取物后机械手恢复注塑机的动作。控制系统的设计难点在于机械手与注塑机的协调工作关系,福州射出机机械手销售厂家,福州射出机机械手销售厂家。在控制系统的指挥下,机械手按照预定的工作程序完成各个动作,并且将注塑生产出的制品从模具中取出并传送到指定地点或下一个生产工序中。在设计时,福州射出机机械手销售厂家,应根据注塑机的性能、机械手的作业条件和要求、制品的形状和重量等来确定控制系统。
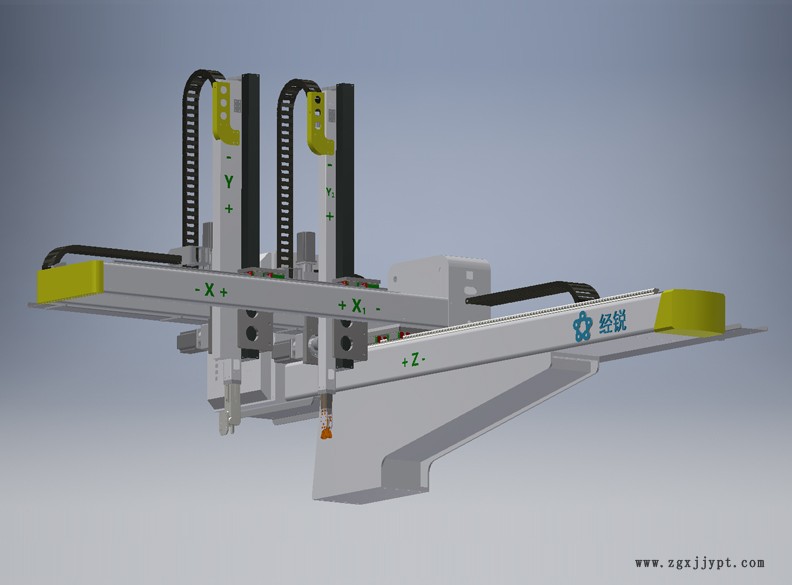
机械手设备:三轴/五轴可同动的CNC控制方式,大幅提高射出机的生产效能。2、 传统取出机的定位精度在±0.1mm以内,很好的运动重现性与灵活操控性,于取出前、后可搭配各种周边自动化设备的系统连结,可构成随机无人化的境界3、配合周边自动化可做模内埋入、模外剪胶口、修边、模外堆叠、装箱等高精度动作4、完全由手控器数位化调整X.Y.Z各轴行程,配合治具校模每种生产模具只需要校模一次,下次上模完全免设定,直接模组对应即可,很大提升人员的作业效率和可靠性。

机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,之后再按照规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等需要同时控制的场合,即连续控制的情况下使用。