| 品牌 : | 经锐/APEX |
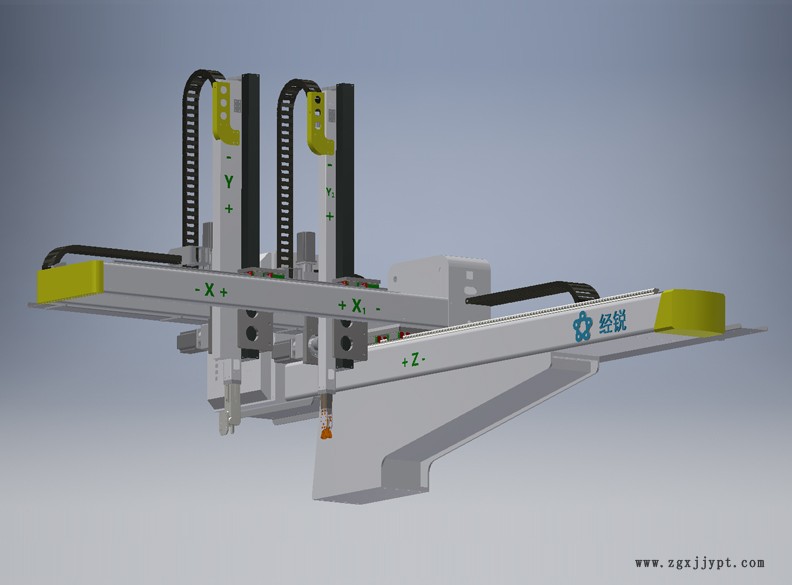
JRH 伺服机械手:模组化设计、模具化生产、CNC加工成型,各轴均采用高强度方管和铝合金型材搭配进口高刚性线性滑轨,噪音低、振动小、使用寿命长。框架式引拔结构设计,具有良好的刚性。五轴连动可模拟人手取出动作,如倒钩、斜面等不规则取出路径,简化治具制作难度,降低治具制作成本。适用各类产品高速取出、堆叠、埋入、品检等应用,提升工厂自动化率,从而节省人工。开放式引拔结构设计,具有良好的刚性和空间开放性。三轴连动可模拟人手取出动作,如倒钩,厦门经锐机械手厂家,厦门经锐机械手厂家,厦门经锐机械手厂家、斜面等不规则取出路径,简化治具制作难度,降低治具制作成本。适用各类产品高速取出、堆叠、埋入、品检等应用,提升工厂自动化率,从而节省人工。符合SPI与EURO-MAP标准,可兼容全球各品牌注塑机。

伺服机械手它具有动作灵活可控、定位准确可靠、负载驱动力高、环境适应力强等特点。目前,多自由度机械手应用于钢铁、海洋、石油、化工、物流搬运等生产自动化行业,很大减轻了工人劳动强度和劳动条件,提高了生产效率,稳定了产品质量。现有的大部分机械手运用电机作为动力,具有结构简单、重量轻、动作迅速、工作可靠、节能和环保等优点,但是,电气机械手负载相对较小,并且要有配套的减速设备,对抗冲击和高负载方面没有优势。而液压机械手采用液压动力,运用电液伺服控制,具有动作灵活、负载刚性大、精度高、响应速度快、功率重量比大的优点,比较适合大功率负载搬运的场合。
如果机械手采用装配架-传动齿轮驱动,注意在运行过程中是否有任何迟疑或晃动发生。除了光滑平稳的动作之外的所有运动都可以表明驱动系统损坏或内部寄存了一些异物。机械手推动向下运动时,快速检查装配梁和传动齿轮之间动作或齿隙的方法是推拖运动臂,感觉异常运动(来回动作不同)。然而由于正常的厂家公差精度非常高,因此本试验方法将会非常不准确。如果你怀疑装配梁和传动齿轮可能有问题,较好的方法是使用量程长的磁性表座。按照厂家说明书调整好齿隙后,检查轴的全部行程,保证装配梁和传动齿轮之间没有太紧的地方。