
| 品牌 : | 经锐/APEX |
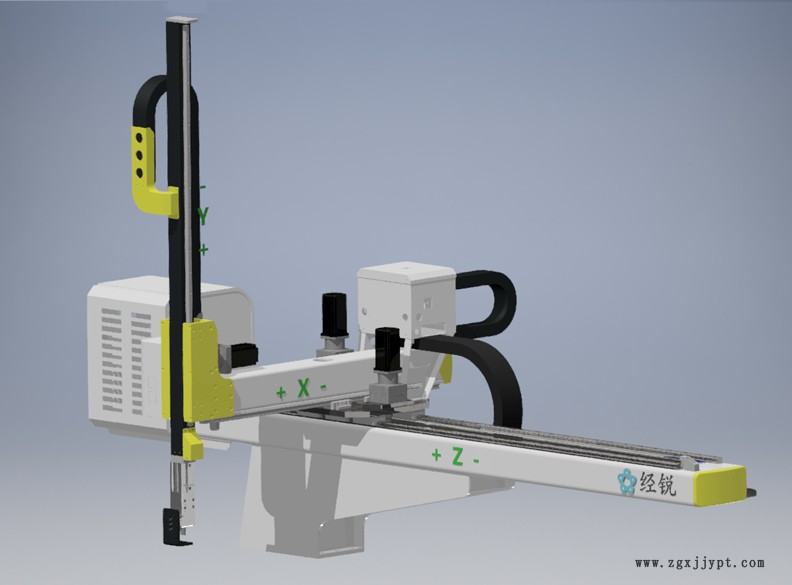
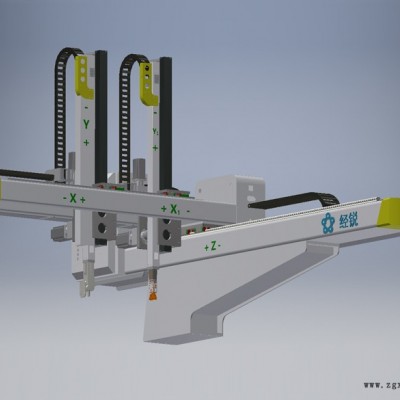
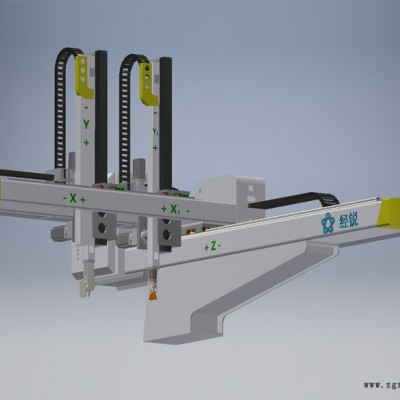
机械手的执行机构分为手部、手臂、躯干;手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的比较多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,通常都是指真空吸盘或磁性吸盘。2、手臂,福建经锐机械手价格,手臂的作用是引导手指准确地抓住工件,福建经锐机械手价格,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要准确地定位,福建经锐机械手价格。3、躯干躯干是安装手臂、动力源和各种执行机构的支架。

机械手的种类,按驱动方式区分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两样;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换***等,通常没有独立的控制装置。有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。

智能型注塑机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,通常采用伺服驱动,能够进行比较大限度的仿人执行比较复杂的操作,还可以通过配备先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的注塑机器人。械手按其他分类方式分类如下:驱动方式分为气动,变频,伺服。按机械结构分为旋转式,横行式,侧取式。按手臂结构分为单截,双截。按手臂多少分为单臂和双臂。按X轴结构分为挂臂式和框架式。按照控制程序的不同分为多套固定程式和可自主编辑程式。按手臂可移动区分设备大小,一般以100MM递增。注塑机械手组成编辑注塑机械手的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。