| 品牌 : | 经锐/APEX |
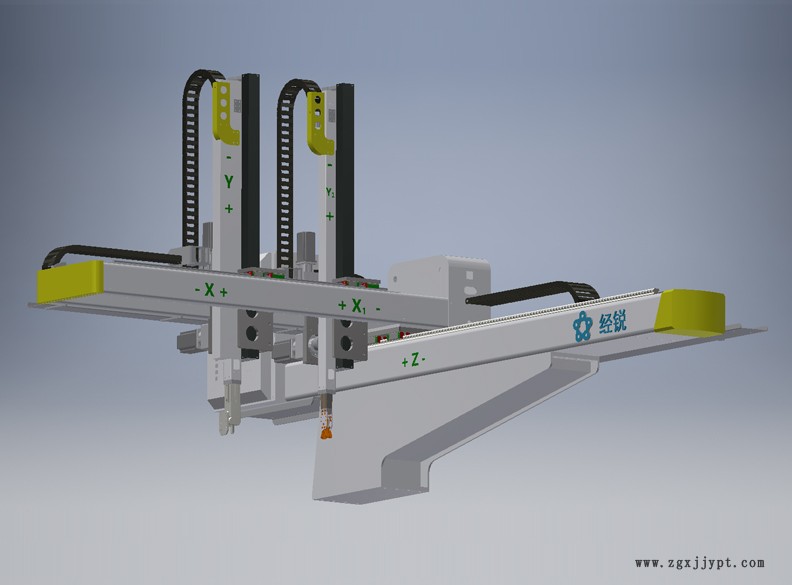
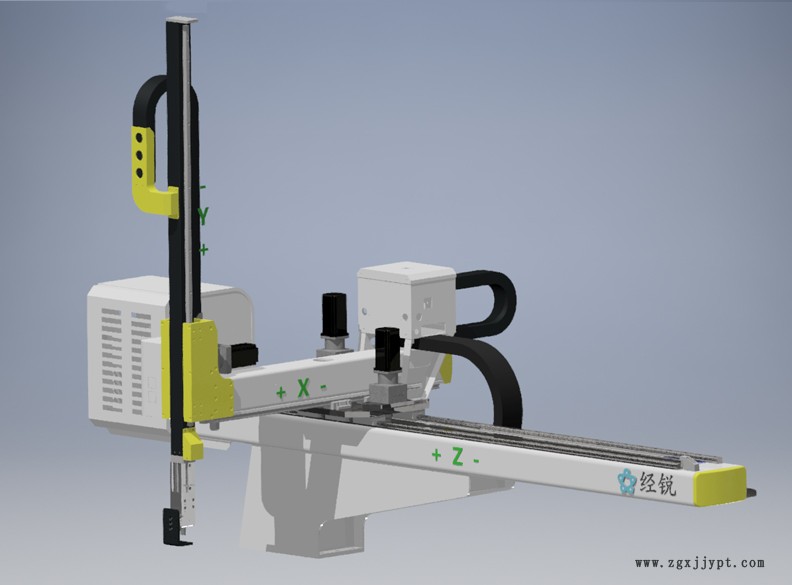
智能型注塑机械手:该类型机械手一般包括多点记忆置放、任意点待机、较多自由度等功能,通常采用伺服驱动,能够进行比较大限度的仿人执行比较复杂的操作,泉州APEX机械手报价,还可以通过配备先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能的注塑机器人。械手按其他分类方式分类如下:驱动方式分为气动,泉州APEX机械手报价,变频,伺服。按机械结构分为旋转式,横行式,侧取式。按手臂结构分为单截,双截。按手臂多少分为单臂和双臂。按X轴结构分为挂臂式和框架式,泉州APEX机械手报价。按照控制程序的不同分为多套固定程式和可自主编辑程式。按手臂可移动区分设备大小,一般以100MM递增。注塑机械手组成编辑注塑机械手的组成一般由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或液压动力来驱动机械部件的运转,达到取物的功能。

利用协作式机器人简化物料搬运、包装、堆垛、拣选、贴标签和装箱操作。轻量化协作式机械臂可实现自动化的物料搬运流程,从而将工人从重复繁重的工作中解放出来。自动化流程不仅能够降低新产品包装成本,缩短产品生命周期,还能缓解劳动力短缺问题,让您轻松应对季节性高峰。协作式机器人集成创新夹具、计算机视觉和机器学习系统,能够在非结构化的环境(例如垃圾箱或搬运箱)中拾取各种物体,能够轻松集成SKU扫描,拾取任意形状的邮袋或产品,让电子商务、订单履行、仓储、物流和供应链的运营更加简单、快捷、效率。
机械手所用的驱动机构主要有4种:液压驱动、气压驱动、电气驱动和机械驱动。液压驱动式机械手通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械手执行机构进行工作。通常它的具有很大的抓举能力(高达几百千克以上),其特点是结构紧凑、动作平稳、耐冲击、耐震动、防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。气压驱动式其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便、动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。