| 品牌 : | 经锐/APEX |
厦门经锐精密设备有限公司创建于2013年,公司主要经营:丹麦UR机器人、丹麦MIR移动机器人、加拿大ROBOTIQ 电动夹爪、比利时PICKit 3D视觉、台达四轴机器人、中国台湾APEX精锐机械手、日本FANUC机器人以及周边配套集成自动化的研发及制作,福州取出机机械手价格,福州取出机机械手价格。公司是以工业自动化、全厂自动化为主要导向,致力于向客户提供适合客户实际需求的自动化整套解决方案,福州取出机机械手价格,我们有专业的非标设计人员、技术人员、售后服务人员、销售人员。公司有自已的展厅和展机,欢迎有需求的客户随时到公司参观、指导!

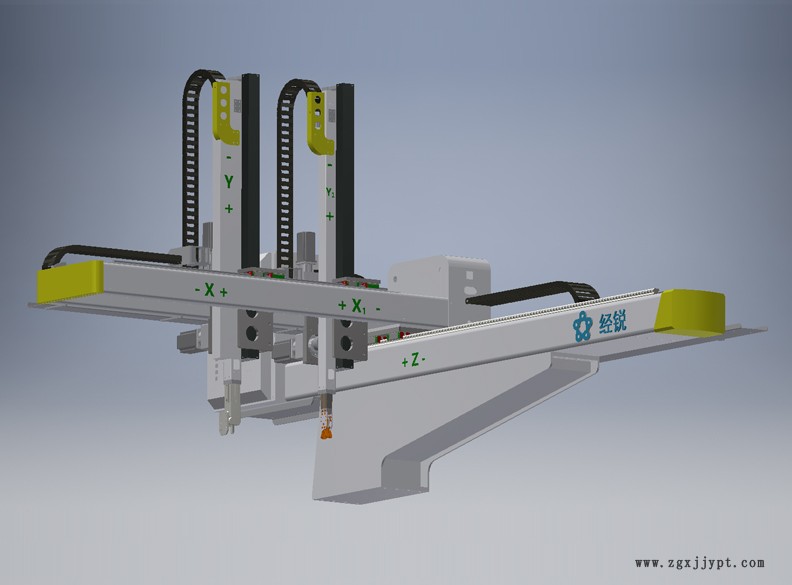
注塑机械手的组成通常由执行系统、驱动系统、控制系统等组成。执行和驱动系统主要是为了完成手臂的正常功能而设计,通过气动或电机来驱动机械部件的运转,达到取物的功能。注塑机机械手从维持长期运行来看,始终注意一些重要的运行状况将会减少停工期并降低成本。应该保持所有轴处的导轨和轴承清洁以及良好的润滑性能。如果机械手运行在充满灰尘的环境中,那么需要经常清理导轨。如果你发现任何金属碎片或粉末,那就可能表示润滑不好。为了保证合适的润滑,拥有恰当的线性导向系统非常关键,大多数机械手拥有自动化的润滑系统以及需要定期替换的部件。
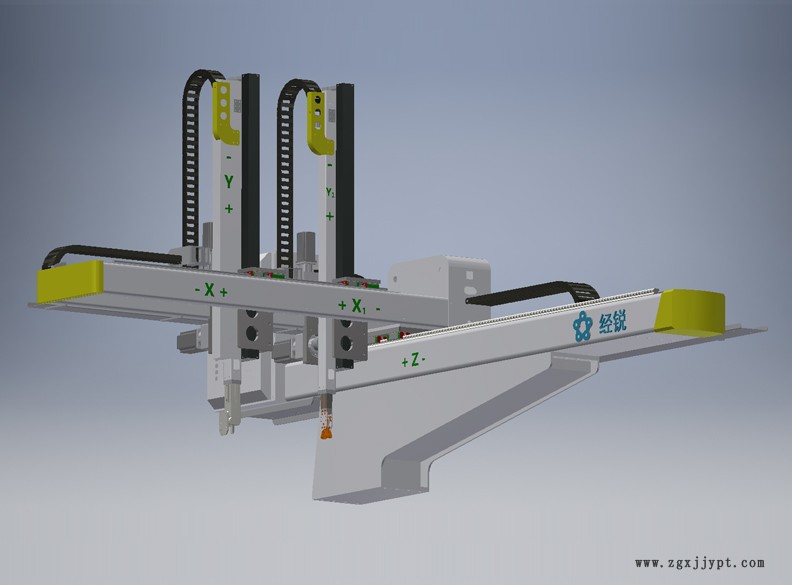
机械手主要由执行机构、驱动机构和控制系统三大部分构成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械手设计的关键参数。自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。通常专用机械手有2~3个自由度。控制系统是通过对机械手每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的**通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。