





| 品牌 : | 创威 | 型号 : | CW-R100 |
| 加工定制 : | 是 | 用途 : | 产品上下料 搬运 测量 切割分板 装配 |
机器特点:
1.占地面积少,有利于客户厂房中生产线的布置,并可留出较大的库房面积。
2.智能识别不同物体并进行分类、搬运、传送,实现过程自动化。
3.只需定位抓起点和摆放点,教示方法简单易懂。
4.通过图像识别控制法,可应用到其它领域。
机器规格
IPB 1600-6/12
行程(m) 1.2
有效荷重(kg)6
功率:1.5KW
机械臂载荷(kg)30.5
机器人底座:484*648
机器人高度:IRB 1600-6/1.2和IRB 1600-10/1.2 1069mm
机器人高度: IRB 1600-6/1.45和 IRB 1600-10/1.451294mm
机器人重量:250kg
性能:6/12 6/1.45 10/12 10/1.145
重复定位精度:0.02mm 0.002mm 0.02mm 0.05mm
路径定位精度 :0.13mm 0.19mm 0.06mm 0.13mm
运动范围工作范围 1.2 1.45
轴1 ﹢180°至﹣180 ° ﹢180°至﹣180°
轴2 ﹢136°至﹣63° ﹢150°至﹣90°
轴3 +55°至-235° +65°至245°
轴4 +200°至-200°(默认) +200°至-200°(默认)
+/-190°转 +/-190°转
轴5 +115°至-115° +115°至-115°
轴6 +400°至-400°(默认) +400°至-400°(默认)
高速度 6kg 10kg
轴1 150°/s 180°/s
轴2 160°/s 180°/s
轴3 170°/s 185°/s
轴4 230°/s 385°/s
轴5 400°/s 400°/s
轴6 460°/s 460°/s

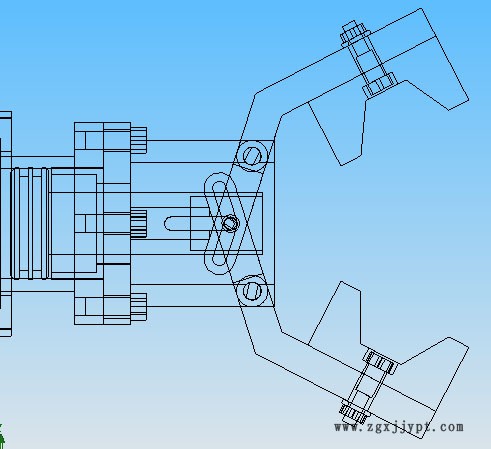
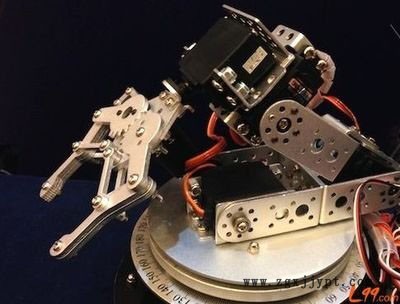
名称:机器人抓手
1:机械手抓手,夹抓,抓抓,爪子,卡抓
2:机器人抓抓,爪子,夹抓,卡抓,抓手
3:机械臂抓抓,夹抓,爪子,抓手,卡抓
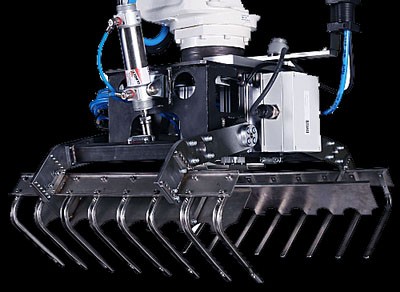
4:码垛抓抓,抓手,爪子,卡抓,夹抓
5:自动化抓手,爪子,夹抓,卡抓,抓抓
6:夹持器抓抓,夹抓,抓手,卡抓,爪子
7:金属臂抓抓,抓手,爪子,夹抓,卡抓
8:伺服抓抓,爪子,抓手,夹抓,卡抓

